Skip to content
Accelerating Research on Neuromorphic Perception, Action, and Cognition
Menu
Primary menu
HOME
PARTICIPANTS
ACTIVITIES
FELLOWSHIPS
SEMINARS
COMMUNITY RESOURCES
Events
Resources and Tools
News and Blogs
Videos
Books and Journals
Jobs
World Map
CONTACT US
Daqi Liu
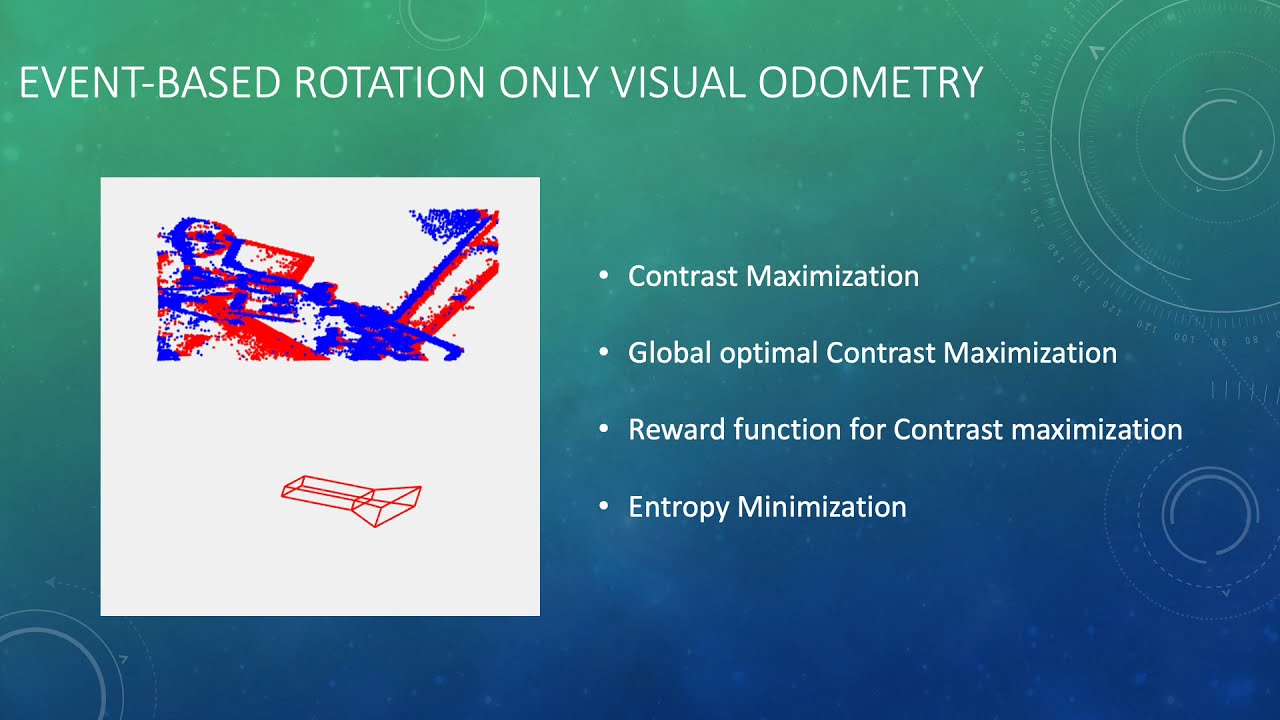
Spatiotemporal registration for event-based visual...
1 views
Scroll Up